
The pilot tests were performed in a special setting of pipe segments, called pressure chamber. These tests included the detection of one pipe-joint with the robot’s vision system, the cleaning with different wire brushes disks and the sealing with the developed injection system and sealant.
The tests for the detection and cleaning were performed in Vienna Waterworks (Wiener Wasserwerke) at Laxenburg, Austria. And the sealing tests were performed at Eisenstadt, Austria (Wasserleitungsverband Nördliches Burgenland) with the same pressure chamber.

Pressure chamber.
The pipe-joint detection is done with the omni-directional camera, located at the robot’s front-end. In this configuration with one video image the entire in-pipe surface is obtained. Then, an image-processing algorithm unwraps the video image and convert the circular features in linear, enabling the algorithm and the operator to detect the pipe-joint.
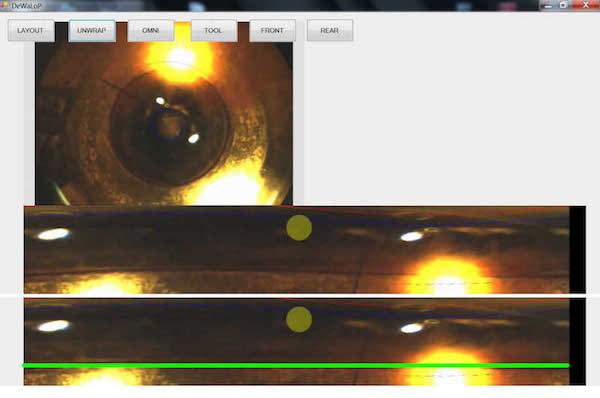
Pipe-joint detection.
Line detection from transforming radial image to perspective.
The cleaning process was performed in two steps, involving two different wire-brushes disk configurations. The first configuration integrates a straight knotted wire-brushes disk to clean the base of the pipe-joint. And, the second configuration integrates a tapered knotted wire-brushes disk to clean the lateral walls from the pipe-joint

The DeWaLoP robot is strong and able even to cut the pipe if a cutting disk is attached to its tool system.
Removing corrosion in region (pipe's one quarter).
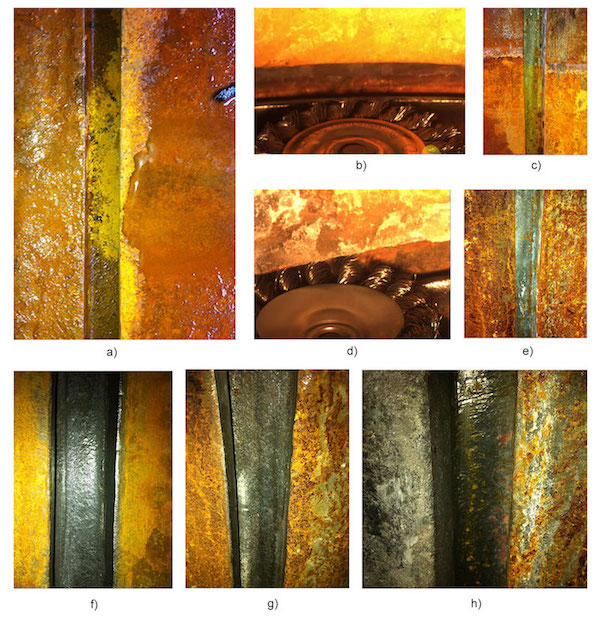
Results from cleaning the pipe-joint ”quick cleaning”. a) Corroded pipe-joint inside the pressure chamber. b) Cleaning process with straight knotted-wire-brushes disk. c) Preliminary cleaning results, revealing medium corrosion levels. d) Cleaning process with tapered knotted wire-brushes disk. e) Preliminary cleaning results from ”quick cleaning”, revealing cleaner pipe-joint areas. Results from cleaning the pipe-joint ”full cleaning”. f) Around 95 to 99% of corrosion removed. g) Around 90% of corrosion removed, still small areas with corrosion can be seen. h) Around 85% of corrosion removed, revealing corroded points in groove areas.
The sealing procedure is complex and time consuming. It involves several steps: the preparation of the sealant material, which consists of mixing two epoxies. Then, the cartridge charge with the mixed sealant and the mounting of the cartridge on the robot’s injection system. Finally, the robot applies the sealant to the pipe.
In order to obtain the sealant for filling the pipe-joint, two high viscosity epoxies are mixed resulting in a homogeneous sealant material. Once mixed, the curing time is one hour. Thus, after the mixture, the sealant must be inserted in the injection system cartridge as fast as possible so it can be applied in the pipe-joint before the chemical reaction starts.

Sealant material preparation and integration in the robot’s injection system.
The next process is the insertion of the robot in the pipe with the injection system mounted and charged with the sealant.
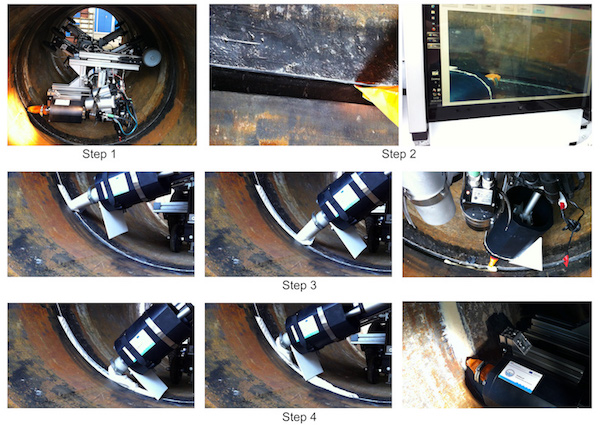
Pipe-joint sealing experiment.
Sealing the pipe-joint [video speed 3x].
The pilot tests for pipe-joint detection, cleaning and sealing were performed in a special setting of pipe segments, called pressure chamber. The initial state of the pipe-joints inside the chamber were corroded.
The pipe-joint detection was performed with an omni-directional camera located on the front-end of the maintenance unit, from which the video images were unwrapped by a computer vision algorithm and the circular features of the pipe where transformed into linear. Enabling line matching algorithms and human corroboration.
The cleaning of the pipe-joint was done with two different types of knotted-wire brushes disks, in order to remove the corrosion from the base and lateral pipe-joint surfaces. The results revealed 80% to 95% corrosion removed, which comply with the minimum required of 80%.
The sealing tests were the most elaborated and complicated, due to the handling and mixing of the epoxies. Nevertheless, the injection system applied properly the sealant into the pipe-joint for a sucessfull pipe-joint rehabilitation.