
In-pipe robots working envirionments can be inside water or sewer pipes. In these cases, the major challenge is to move in uneven, slippery and wet surfaces. Hence, these type of robots are complex to design, since, may integrate a combination of different locomotion methods to move inside these extreme working environments. Also, its mechanical components require a higher degree of protection against water splashes or even be fully water-proof.
Robot locomotion is the study of how to design the robot mechanisms in order to allow fluid and efficient movement. In-pipe robots can be classified into several elementary forms according to their movement patterns. They may be classified into wheels [Okada and Sanemori, 1987, Oya and Okada, 2005, Suzumori et al., 1999, Ryew et al., 2000, Schempf et al., 2003, Zhang and Yan, 2007, Miyagawa and Iwatsuki, 2007, Li et al., 2007a, Hirose et al., 1999, Kawaguchi et al., 1995, Fong and Thorpe, 2001], track / caterpillar [Park et al., 2011, M.M. Moghaddam, 2005], inchworm [Bertetto and Ruggiu, 2001, Lim et al., 2008, Ono and Kato, 2010], walking [Neubauer, 1994, Zagler and Pfeiffer, 2003], screw [Horodinca et al., 2002] and pig [Hu and Appleton, 2005] types depending on their traveling mechanisms.
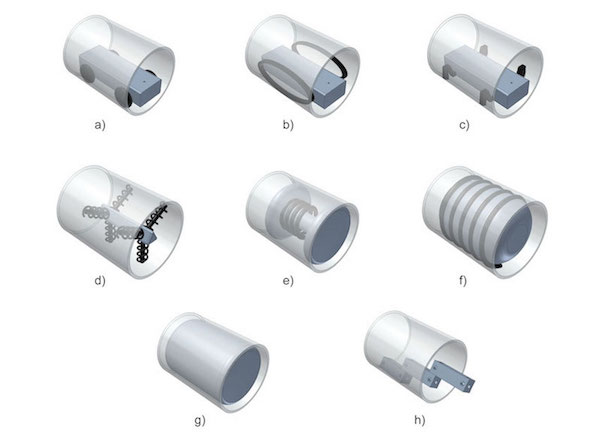
In-pipe robotic locomotion types: a) Wheel type. b) Track / caterpillar type. c) Leg type. d) Wall-press type. e) Inchworm type. f) Screw type. g) Pig type. h) Snake type.
These robots may also be classified according to their structures (as plane types): single-plane type [Okada and Sanemori, 1987, Oya and Okada, 2005], with arms 180° apart, or 3-plane [Roh and Ryeol, 2005, Suzumori et al., 1999, Horodinca et al., 2002, Ryew et al., 2000, Schempf et al., 2003, Zhang and Yan, 2007] with arms separated 120°, 4-plane types [Miyagawa and Iwatsuki, 2007] with arms separated by 90° and 6-plane types [Li et al., 2007a] with arms separated by 60°.
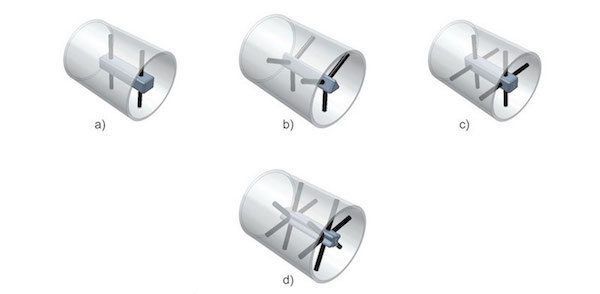
In-pipe robotic locomotion types according their plane type: a) Single plane type. b) 3-plane type. c) 4-plane type. d) 6-plane type.
Nowadays, it is common that in-pipe robots combine two or more locomotion types, in order to add flexibility and robustness to the mechanisms. With hybrid locomotion systems, the in-pipe robot is able to adapt and navigate in various pipe sizes and configurations.
The wheeled wall-pressed type provides advantage in high speed mobility in a simple mechanical configuration. The caterpillar wall-pressed type gives more advantage in preventing motion singularity problem while surpassing branches [Xuzhi et al., 2007]. While, wheeled wall pressing screw type gives the best navigation in curved pipe.
Once the locomotion of the robot has been selected. The next step is to select the clening method. The most common methods for in-pipe robots to clean the inner pipe surface are based on impact abrasion and water pressure. Hence, in-pipe cleaning robots can be categorized in to two types: 1) Tool-based clean- ing robots [H. Schempf and Crowley, 2003, Z. X. Li and Wang, 2010, Thinh et al., 2011, Jung et al., 2011, Dhananchezhiyan et al., 2013] and 2) Pressure-based cleaning robots [Saenz et al., 2010, Feng et al., 2008].
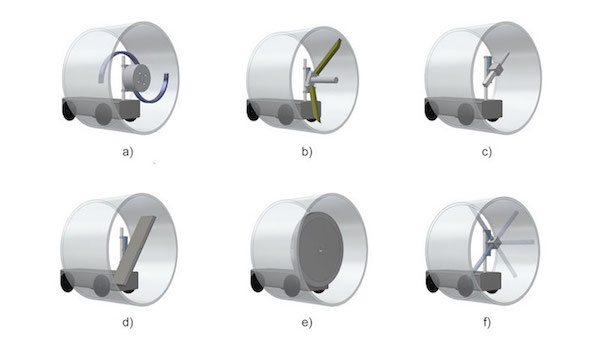
In-pipe robotic cleaning types: a) Impact abrasion with flails. b) Umbrella type. c) Commercial - vehicle type. d) Cutter cleaner arm. e) Disk cleaner disk. f) Pressure-based.
The DeWaLoP in-pipe robot objective is to rehabilitate the pipe-joints of aged cast-iron pipes with lead-joint sockets. These fresh-water pipes are more than 100 years old and with diameters ranging from 800mm to 1200mm.
The DeWaLoP robot can be modeled as a structure inside the pipe, fulfilling two objectives, to move in the pipe and to repair it. For moving inside the pipe a driving module is required, whereas for repairing the pipe, a module able to set itself in the center of the pipe and from its central axis an arm or arms with tools rotate and repair.
Hence, the model of the DeWaLoP robot includes two main modules: a mobile robot and a repairing module known as maintenance unit. In order to set the repairing structure centered inside the pipe, a couple of three start supports covering its entire cross-section are required. So, the robotic arm with the tool can rotate itself and move axially while rotates from the central axis of the maintenance unit.
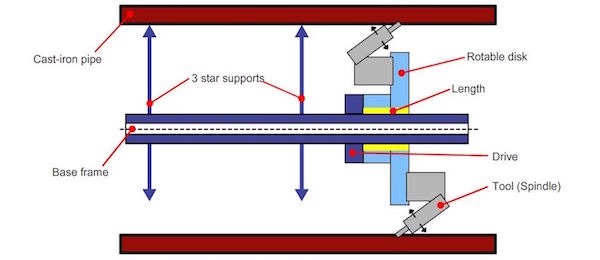
Maintenance unit and tool system concept.
The DeWaLoP in-pipe robot consists of five modules, four of them are integrated in the in-pipe robot: the mobile robot, maintenance unit, tool and vision systems. While the control station is located outside the pipe.
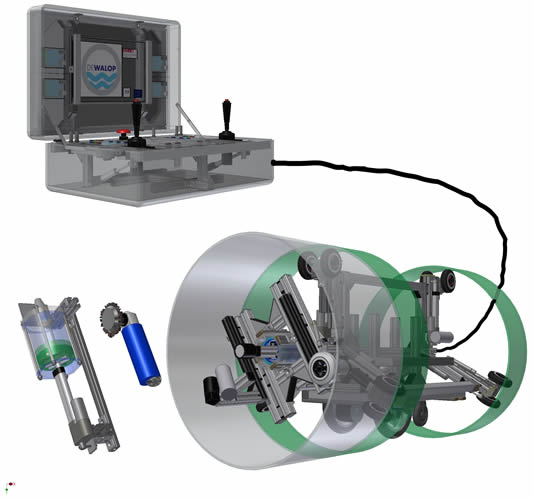
Control station (remote control) outside the pipe. DeWaLoP in-pipe robot modules: 1) Mobile robot. 2) Maintenance unit. 3) Tool system. 4) Camera system.