
Reconfigurable robots refer to a category of robots that their components (individual joints and links) can be assembled in multiple configurations and geometries [li Yang et al., 2009]. Most of existing latching mechanisms are based on the physical tools such as hook, cages or magnets, which limit the payload capacity [Meng et al., May] [Salemi et al., 2006] [Gilpin et al., pril] [Shen et al., May]. Therefore, the heavy weight robots require a latching mechanism which can help to auto reconfigure itself without sacrificing the payload capability [Mateos and Vincze, 2013c].
The presented LaMMos mechanism is a latching mechanism based on the flexible screw attaching principle. In which actuators are used to move the robot links/joints and connect them with a motorized-screw or disconnect them by unfastening the screw. The right-angle bracket used in this mechanism configuration helps to hold maximum force up to 2000N. The LaMMos mechanism helps the DeWaLoP in-pipe robot to shrink its body to crawl into the pipe with minimum diameter, by reconfiguring the legs positions. And it helps to recover the legs positions to original status once the robot is inside the pipe without loosing its payload capacity. Also, LaMMos add stiffness to the robot legs by dynamically integrate them to the structure.
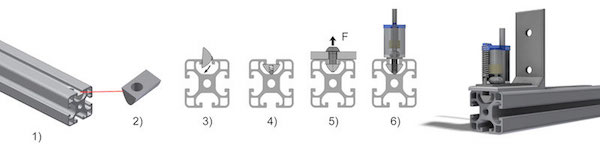
Aluminum profiles representing the robot body where the LaMMos mechanism will be installed.
LaMMos assembly [video speed 5x](left). LaMMos spring system [video speed 2x](rigth).
The LaMMos mechanism mimics the human operation of constructing robot links on the robot body by tightening a screw over a nut inside the body, and deconstructing the robot links by driving the screw out of the body.
LaMMos can be included in any type of bracket, with a single or several LaMMos in the same bracket.
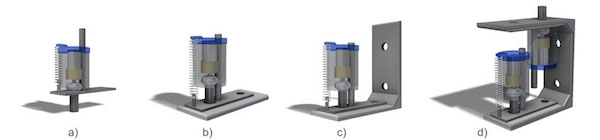
LaMMos mechanism integrated in brackets. a) LaMMos mechanism. b) LaMMos flat-bracket. c) LaMMos right-angle bracket. d) Multiple LaMMos inside a box-bracket.
LaMMos motorized screw latching to nut inside the profile.
The LaMMos mechanism helps DeWaLoP robot to adjust its wheeled-legs to a lower height position before entering a reduced pipe when the robot is already inside pipeline and afterwards helps to recover the original vertical position once the robot passed the reduced segment of the pipe.
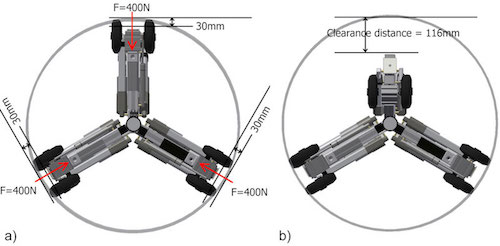
Clearance distance gained by LaMMos mechanism.
In this configuration, the functionality of LaMMos is to attach/detach the 80 × 80mm right-angle bracket from the base profile to the maintenance unit. The functionality of the hinge is to keep the wheeled-leg in contact with the maintenance unit when the LaMMos is detached. In other words, the hinge is required as a rotational connection joint between the base profile and the maintenance unit.
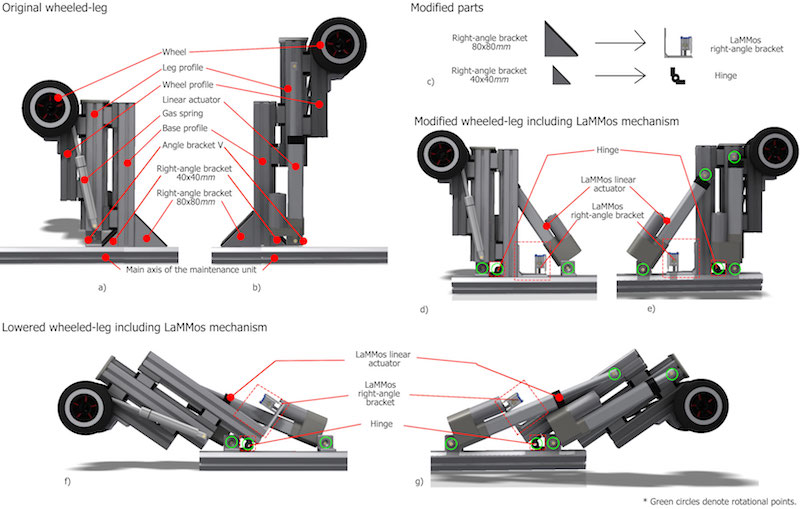
Original and modified wheeled-leg with integrated LaMMos mechanism.
LaMMos assembly (left). LaMMos spring system (rigth).
The presented LaMMos mechanism is useful when the reconfigurable parts of the robot are required to maintain payloads beyond the limit of its movable actuator. It is able to reconstruct a robot, as if a person with a screwdriver tights the screw on the nut. In this way the robot assemble is optimal as the components are latched with each other as if they are constructed [Mateos and Vincze, 2013c].
For the LaMMos mechanism evaluation, the DeWaLoP in-pipe robot was modified. A couple of its wheeled-legs were modified to include the LaMMos mechanism instead of rigid brackets. The objective is to lower the wheeled-legs so the in-pipe robot is able to enter its minimal working pipe diameter while protecting its legs. And once inside the pipe reconstruct the robot wheeled-legs as original. The acting forces on the legs of the robot may reach 2000N and therefore a latching mechanism with strong stability is required. Moreover, this mechanism offers many interesting opportunities for robotic research in terms of functionality, payload and size.
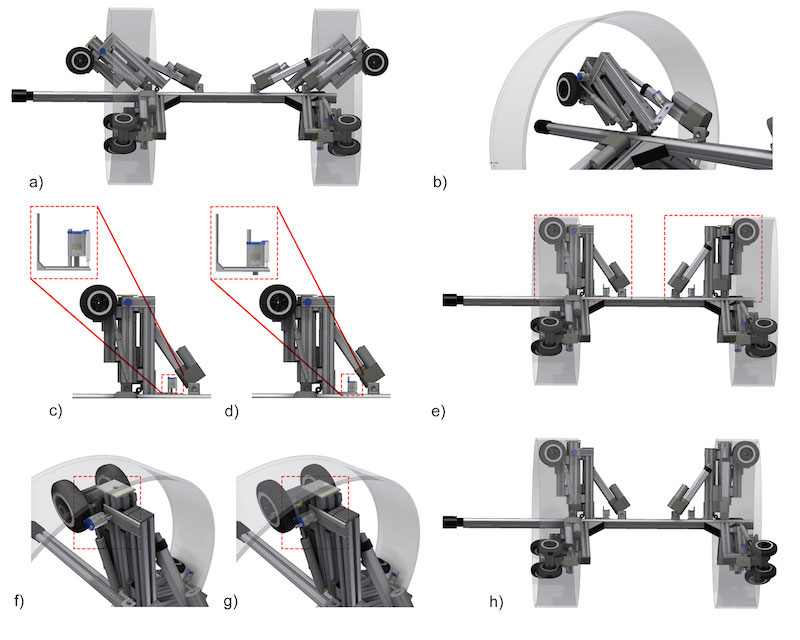
DeWaLoP robot reconfiguration process.