
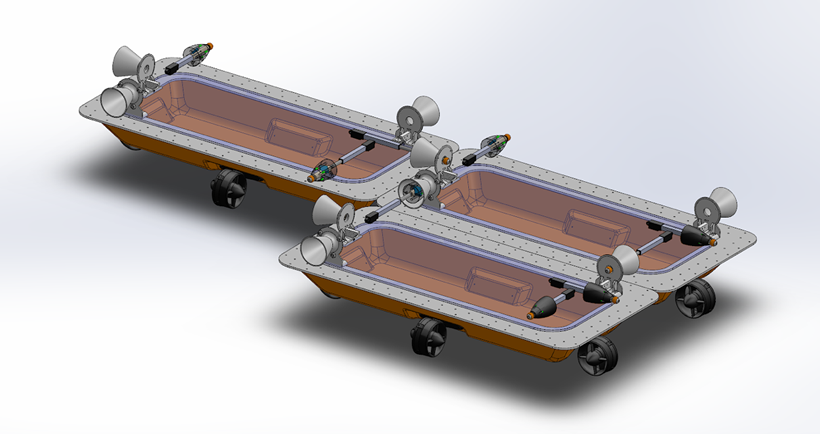
The autonomous latching system enables robotic boats to latch each other secure and efficient. It is based on the spherical joint (ball and socket) that allows rotation and free movements in two planes at the same time. It consists of two parts: the male part that includes a bearing stud on the front-edge, and the female part, which integrates a funnel to guide the male ball into an actuated receptor that traps the ball, creating the spherical joint between the boats. In this configuration, the latching system is capable of securely and efficiently assembly/disassembly floating structures. Each roboat includes both the male and female connectors and thus integrates cameras and tags aboard. In this way, the roboat can be fully connected, one roboat can be connected by others on the front, back, left and right side. The autonomous latching system guides the boats with a camera – tag logic. The camera is located on the boat that wants to latch, while the tag is located on the target boat. Each roboat integrates 6 connectors, 4 cameras and 4 tags to be fully connectable.
How they communicate implicitly: The roboat that latches know its status from the actuated socket, the status can be open or close, and base on this information it can implicitly communicate with the fleet by dynamically change its LCD tag to its current status.
In this way, the tags can give information on the status of latching, the coordination of the fleet to perform different formations. And moreover, the communication can be bidirectional, meaning that the leading roboat R1, who coordinates the fleet to set a formation will receive from the last roboat in the fleet Rn an acknowledge confirmation message that all robots comply with its command by following and changing their visual tags analogous to the “telephone game”.
In the canals of Amsterdam the roboats move more efficiently and less obstructive if the are not join when moving, thus the ability to create formation dynamically is essential for the roboat project.
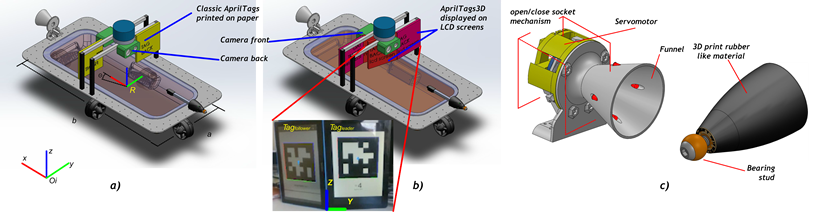
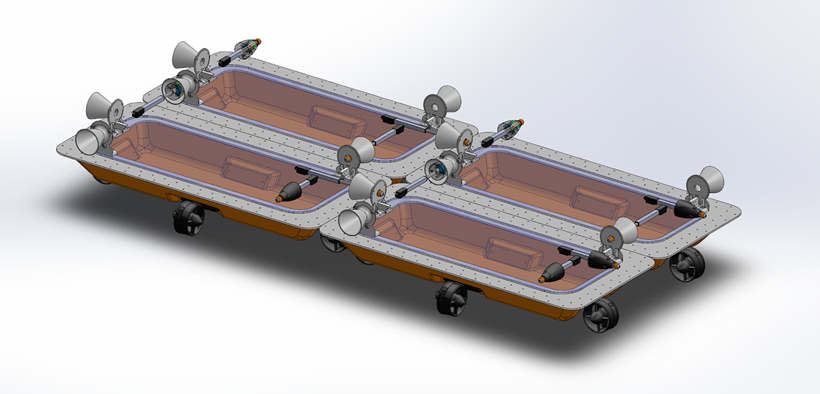
Infrared guiding 3D model
With only visual cues from the latching system (cameras – tags) we are able to reconfigure a fleet of robotic boats by indirectly communicating them by dynamically changing the tags (instead of a printed tag we will use LCD displays) when the boat Rn detects it latches Rn-1. The indirect communication is analogous to the telephone game in which a person whispers a phrase to another neighbors until it reaches the last player in line and then the message is send back to the fist person. In the roboats, the first roboat R1 sets its tag (LCD display) to the other roboats {R2, R3,…, Rn}. Roboats change their tags (whisper the phrase) to their neighbors until it reaches the last player in line Rn. When the last roboat Rn reads the tag and complies with the order from R1, it changes its tag so Rn-1 receives an acknowledge tag that is passed back it until R1 receives the acknowledge message back.
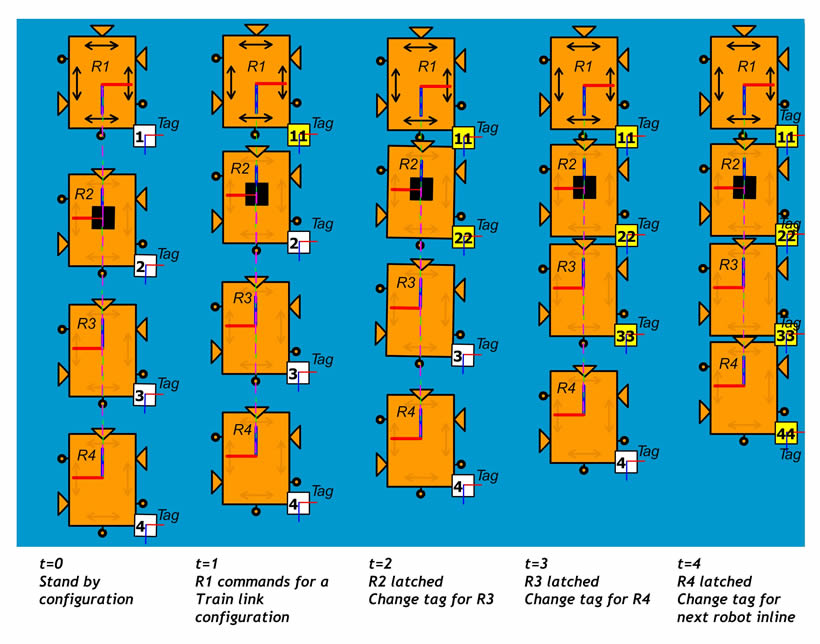
Robotic formation process. From stand by configuration to trainlink with only visual tag in swarm fashion.
Each roboat integrates 6 connectors, 4 cameras and 4 tags to be fully connectable. In this configuration, one roboat can be connected in all surrounding points by four roboat, see Fig 1. On each male pin a tag is set to let the other roboat that these are latching points and on each funnel a camera is set to find a latching point on other roboat.
Stand by configuration: Led Roboat R1 be the head of the fleet R2, R3, R4. In this configuration, R2 is 1m apart from the R1back, R3 is 1m apart from to R2back and Rn is apart 1m from the Rn-1back. The standby configuration means that the roboats are 1m apart from each other and waiting for the tag they are looking to be changed to have a different action. In this way, R1 is the smart roboat and it can change its tag to give an order the fleet. The order is passed from roboat to roboat, once the roboat latches it change its tag so the next roboat knows what to do. For example, R1 changes its tag to request a train link configuration to the fleet.
Train link configuration: In this configuration, R2 is latch to R1, R3 is latch to R2 and Rn is latch to Rn-1. R1 remains static waiting for R2 to latch. Once R2 latches it changes its tag to let know R3 we are doing a train link configuration and so R3 know it need to latch to R2 and so on with Rn. Once Rn latches Rn-1, Rn change its tag to know send a message backwards to let know R1 that the fleet is now in the train link configuration. Telephone game: 1. The first roboat in the line sets a tag (a word or phrase) to the other roboats camera. 2. The Game Continues. Roboats whisper the phrase to their neighbors until it reaches the last player in line Rn. 3. The Conclusion. The last player Roboat Rn changes it tag so Rn-1 until R1 receive the message back
Guiding system based on infrared.
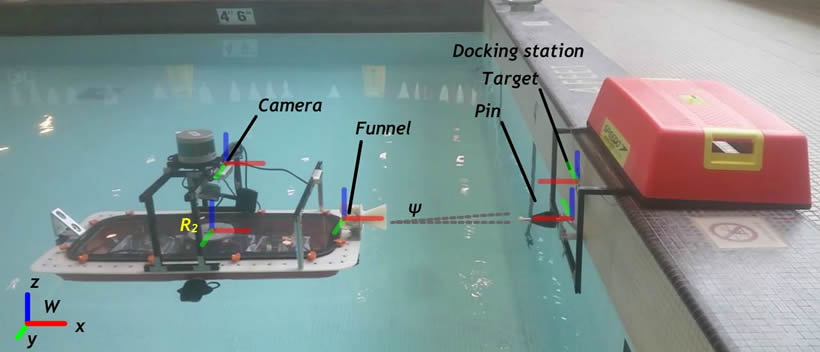
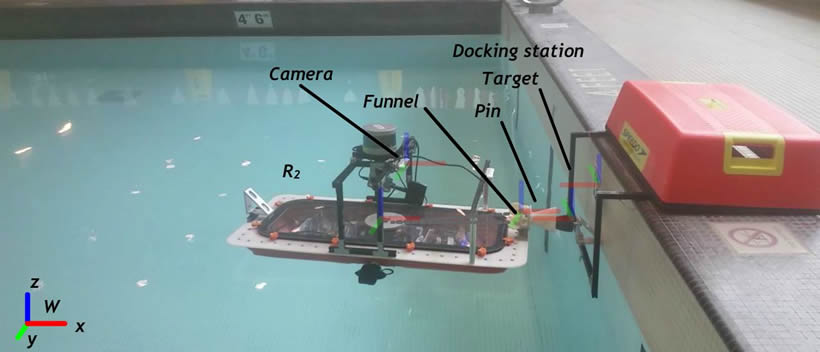
The roboat R navigates from one corner of the swimming pool to face the docking station and then activates the latching guiding controller to perform latching, this is the camera-tag visual servoing. The light reflections creates a challenging situation for the guiding algorithm, since it’s required to adapt its position and orientation overcoming the noisy environment.
Autonomous latching system.
The roboat can see the tag of the previous roboat Rn sees Rn-1 until R1 and are set in stand by configuration, spacing each other 1m waiting for the order from roboat R1. The order is to configure as a train-link, R2 latches R1 and changes its tag to let know R3 that it is latched and the configuration is train-link. R3 latches accordingly and passes the message to the next roboat in line. The train-link configuration is achieved and Rn (in this case R3) changes its tag to let know Rn-1 (in this case R2) that it is latched and progressively R2 changes its tag to let know R1 that the formation has been completed.
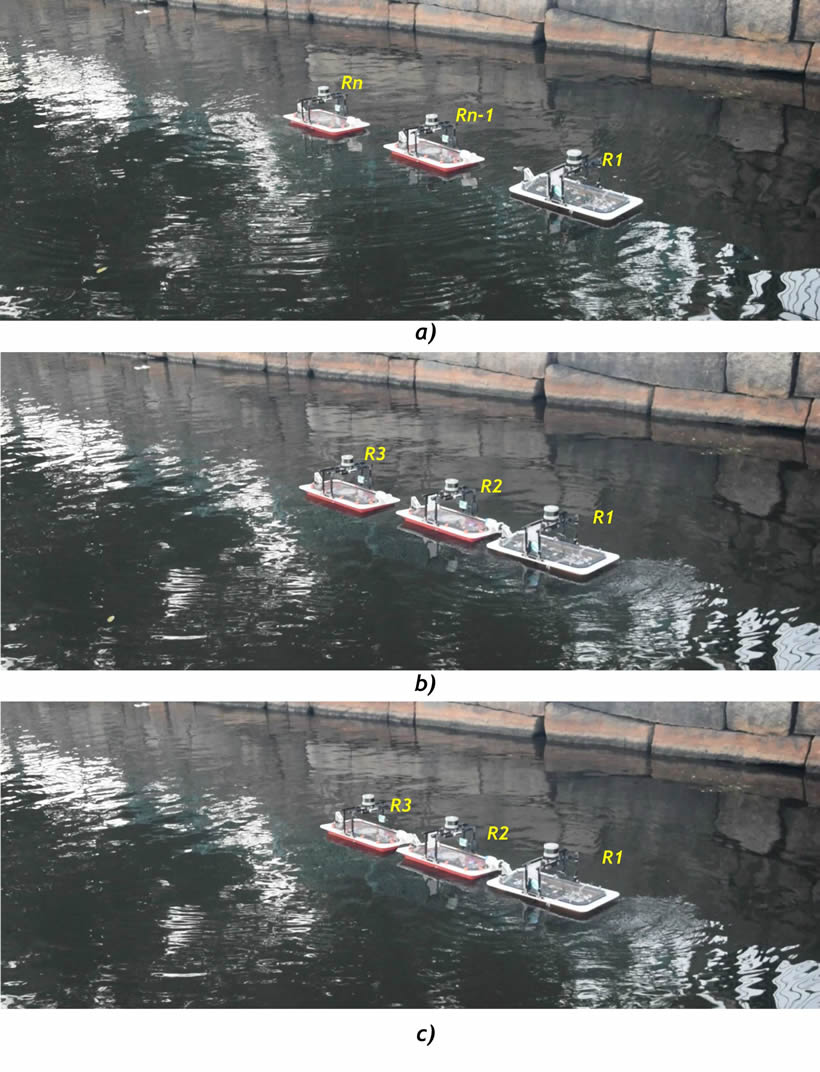
Train link configuration. a) Stand by: roboats spaced 1m. b) R2 latch R1: Tag from R1 tells R2 to latch. b) R3 latch R2: Tag from R2 tells R3 to latch.
The autonomous latching system enables the roboats to configure in basic formation that can be scalable.
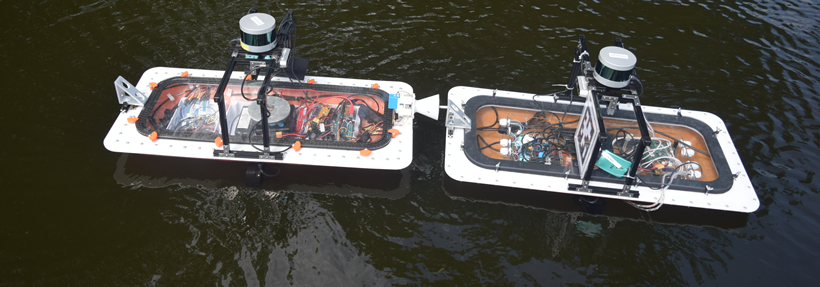
A couple of roboats in train link configuration.
Robotic formation L shape: The robots can connect horizontally or vertically. All robots will follow the same way for latching, they can start horizontally and once completeled will perform latching in the other axis, in this case, vertically.
L formation
Robotic formation Square shape: There are multiple way to perform the square formation. One can be latch horizontally and then vertically. Another is to start with L shape formation and then fit the gap. However, this formation requires retractable funnel or the genderless option.
Square formation from horizontal and vertical latching.
Square formation from L Shape.