
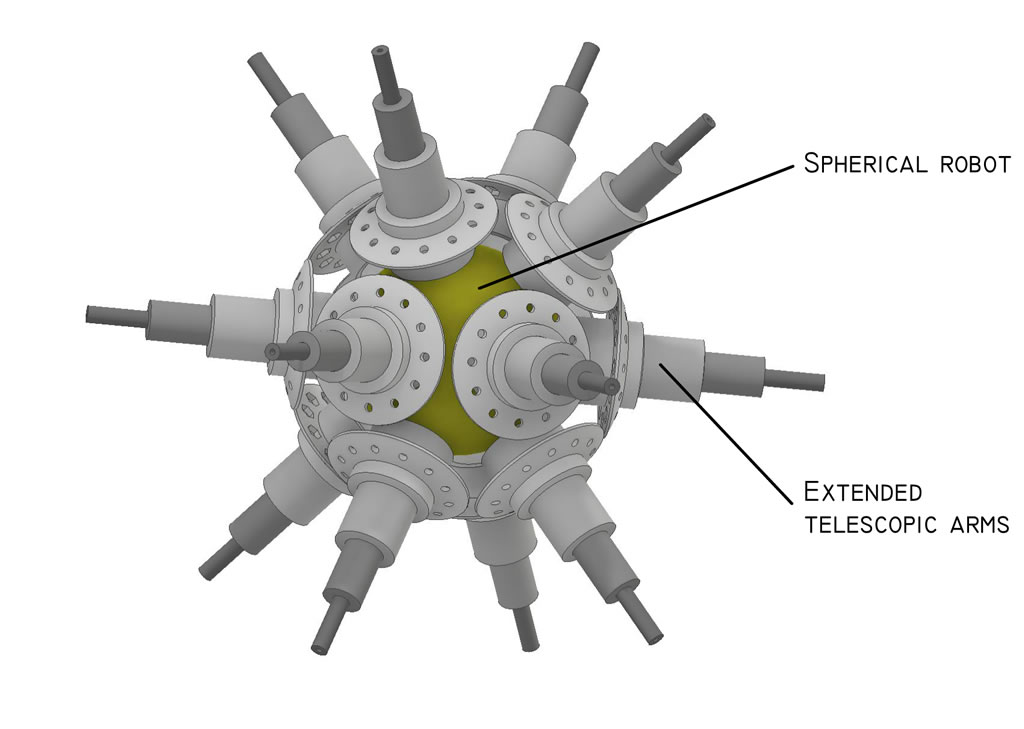
The design of the particle robot consists of three main parts: the inner shell or embedded spherical mobile robot, the outer shell or exoskeleton and the 14 telescopic actuators as the legs or spines of the robot:
Particle robotic 3D model with transparent outer shell.
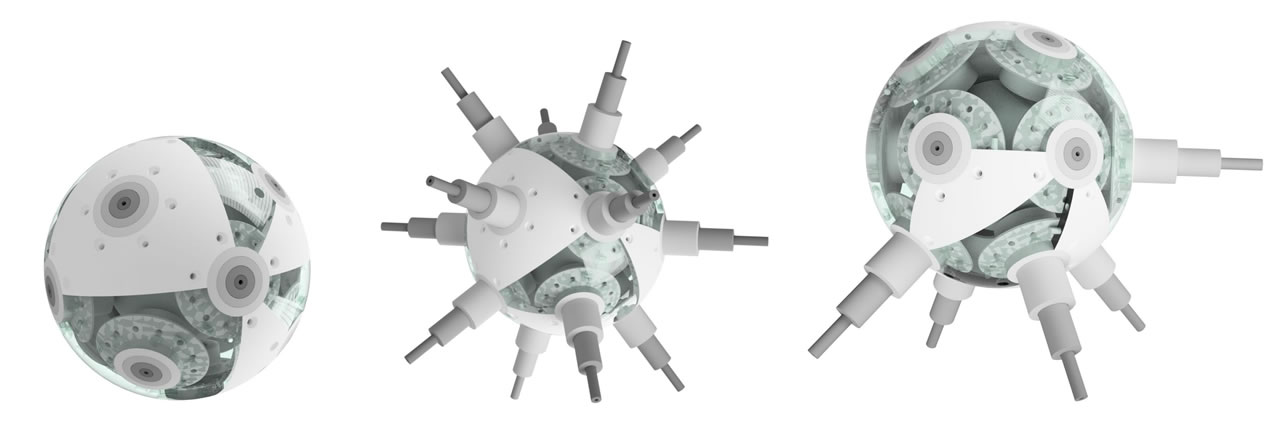
Particle robot with spines fully compressed (left); fully extended (center). Standing in four spines (right)
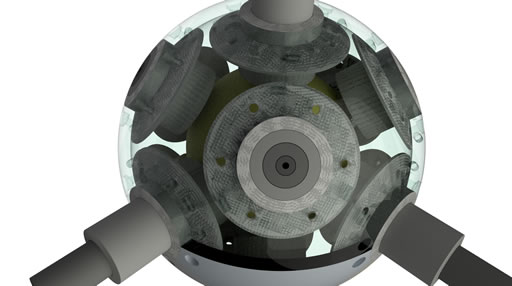
Spherical mobile robots can be divided into three categories according to their driving mechanisms: direct-driving, gravity, and angular momentum. In the direct-driving method the torque from the motor can be directly transmitted to the shell as the locomotive force [6- 9]. The gravity method manipulates the position of the robot’s center of mass to create a torque with respect to the ground contact point to drive the robot to roll [10-12]. In the angular momentum method a flywheel is installed inside the spherical robot. And it rotates the robot’s shell in the opposite direction to balance the angular momentum [13-16]. In the particle robot, the spherical robot integrates the directdrive method, since the motor torques are transmitted to the robot’s shells. Hence, the propulsion force is controllable if compared to the other methods. Moreover, the propulsion force can be extended to a larger scale for fast locomotion and obstacle negotiation. In this configuration, the particle’s spherical robot integrates two independent rubber-rimmed wheels inside the shell with a top slip bearing so the wheels are in firm contact with the inner shell. The particle’s spherical robot is a sealed sphere, capable to communicate in blue-tooth and recharge wirelessly.
Particle robot 3D model with transparent outer shell, exposing the inner spherical mobile robot (left).
The outer shell covers the sealed spherical robot (inner shell), holds the telescopic actuators (legs) and protects its electronics and motors. In this configuration, there are no wired connections between the sphere and the exoskeleton. The outer shell consists of 24 3D printed parts that forms a sphere. The material used for printing the outer shell is a mix of 3D print-material RGD450 and FLEX, which is a rigid material and flexible.
Outer shield is made from 24 parts connecting to the telescopic bases.


3D print soft ruber shell (black) and rigid shell (white).
Electric linear actuators generally offer a low ratio between the length when fully extended to the length when compressed, meaning a fully extended actuators is commonly less than twice the size when fully compressed. The reason is that in its body rest a rigidly piston, without the capability to be folded or bended.
The particle robot requires a novel telescopic actuation able to fit in a minimal space when compressed and with a fast and strong extension ratio to lift and propel itself. The actuation system based on articulated racks works in two modes, when extending the articulations, these are reconstructed as a solid rigid rack, locking the articulations in all axes. Whereas, when compressing the articulations, these are unlocked and can be folded.

Particle robot with telescopic actuators extended (left). 3D print actuator systems for particle robot D = 130mm diameter and particle robot D = 260mm diameter (right).